Exploring the Remapping Impact of Spatial Head-hand Relations in Immersive Telesurgery
ACM CHI 2025
Abstract
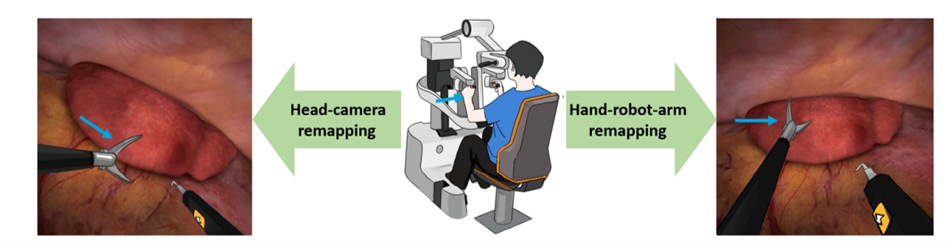
When skilled surgeons are not available at the hospital and surgery is required, the immersive telesurgery system offers a mainstream and effective solution. The operator can observe through the robot's camera and use their hands to control the robot-arms, as if they were the robot. However, common remapping of spatial head-hand relations—due to camera adjustments and robotic arm switching—creates significant visual-proprioceptive conflicts and physical limitations. To explore this, we simulated an immersive telesurgery system and set remapping conditions and situations: head-camera remapping with 6 situations and hand-robot-arm remapping with 12 situations. We assessed their perception and behavior effects across four typical surgical tasks: navigation, location, cutting, and bimanual coordination. The study evaluates spatial perception bias, interactive deviation, workload, and task completion time. Our findings reveal how different remapping targets, attributes, intensities, and situations affect performance, contributing to the understanding of perception mechanisms and offering insights for optimizing operations or systems.